Vamos a crear y utilizar un Bot de Telegram para que funcione con Motion en Raspberry Pi.

¿Cómo crear un Bot para Telegram en Raspberry Pi?
Para crear un bot para avisos por Telegram interactuando con Motion de Raspberry, necesitamos hacer lo siguiente:
- Averiguarmos nuestro ID de Telegram con IDBot
- Usamos Botfather para crear un bot y un TOKEN asociado
- Instalaremos pyTelegramBotAPI para que la Raspberry pueda “hablarnos” por Telegram
- Instalaremos “Motion Detection Telegram” para que cuando Motion detecte movimiento y capture fotos, “Motion Detection Telegram” nos las envíe directamente por Telegram.
En este artículo:
- 1. QUÉ PODEMOS HACER CON UN BOT EN TELEGRAM
- 2. Instalar Telegram y usar el bot IDBot (@myidbot)
- 3. BotFather, el padrino de los bots que nos permitirá crear nuestro bot con la API de Telegram.
1. QUÉ PODEMOS HACER CON UN BOT EN TELEGRAM
Con un bot de Telegram creado con @BotFather podremos realizar multitud de funciones:
2. Instalar Telegram y usar el bot IDBot (@myidbot)
Lo primero hemos de instalar la app de Telegram en nuestro smartphone. También podemos instalar Telegram via Web.
Usaremos el bot IDBot (@myidbot ) para averiguar nuestra id de usuario en Telegram.
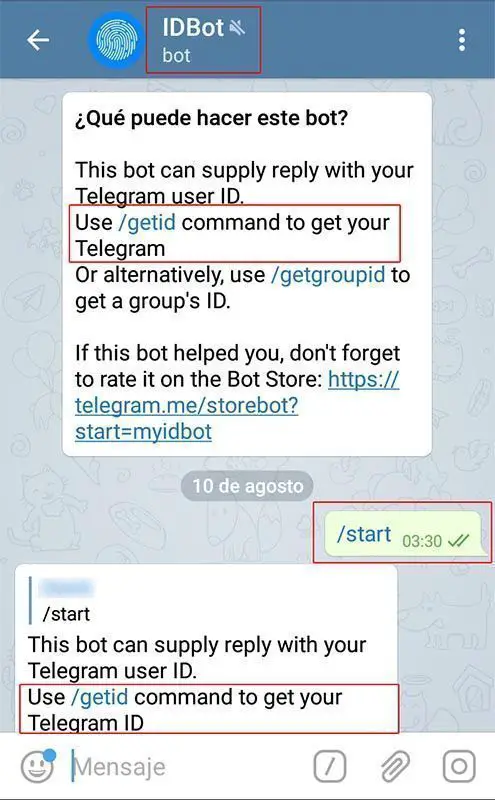
Primero comenzamos con el comando
/start |
Después, con el comando
/getid |
nos devolverá un número, que es nuestra id de Telegram, y hemos de apuntarlo para posteriormente introducirlo en la API de Telegram y poder usar nuestro bot, que crearemos posteriormente con @BotFather.

Llega el momento de utilizar el padrino de los bots de Telegram: BotFather, que nos permitirá crear nuestro bot con la API de Telegram.
3.BOTFATHER
Ahora usaremos @BotFather para crear un bot.

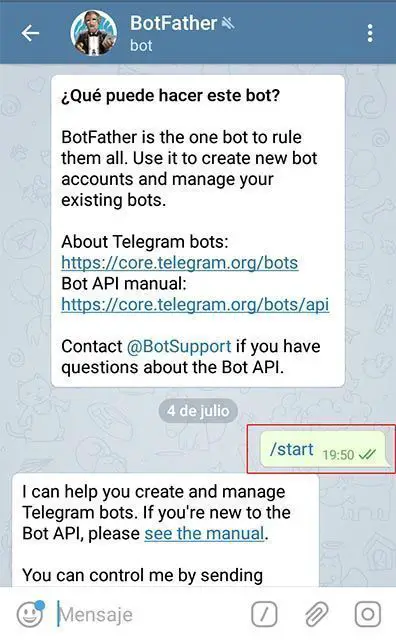
3.1 Comenzamos con@BotFather
Comenzamos con el comando
/start |
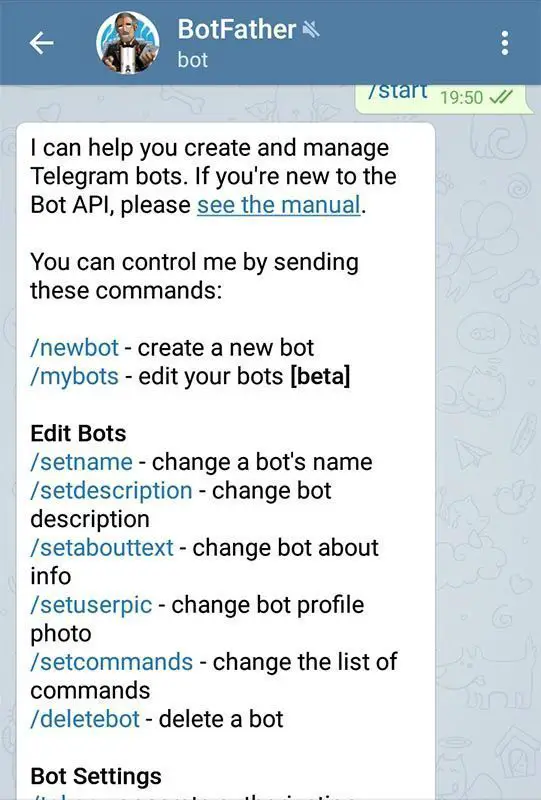
Aquí podemos ver algunos de los comandos que podemos usar para controlar la configuración de nuestro bot creado con @BotFather :
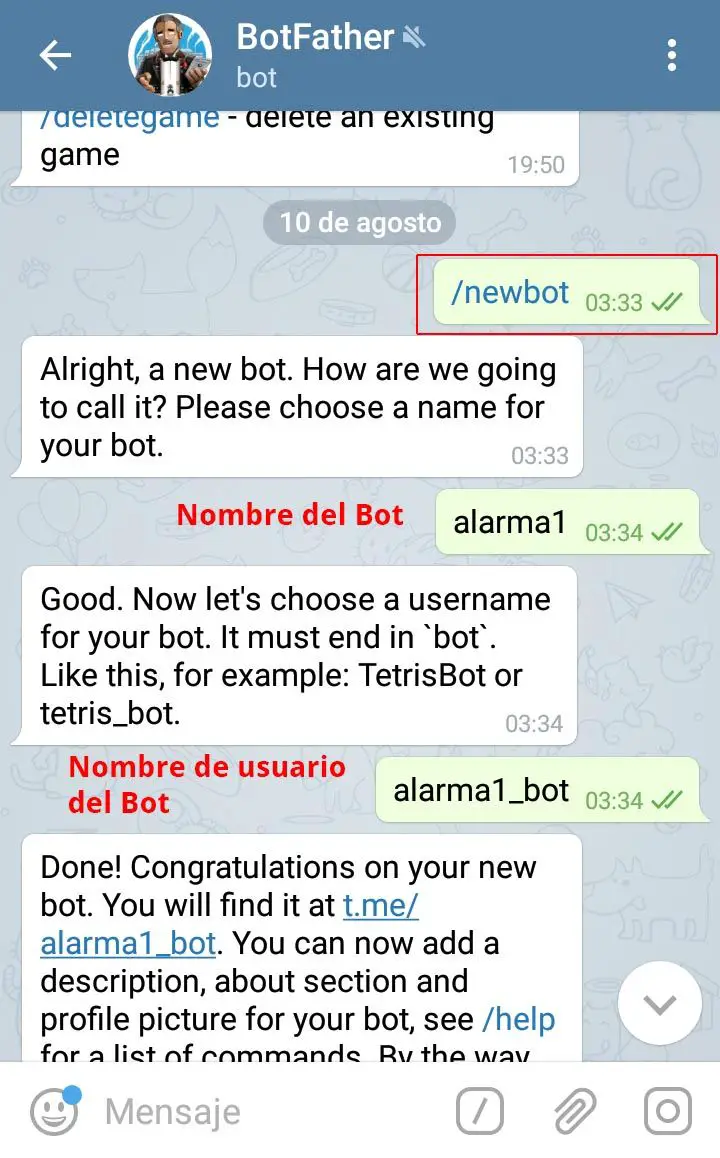
Ahora podemos ver cómo creamos el nuevo bot con @BotFather, y le daremos un nombre, y un username (nombre de usuario):
Comenzamos con el comando
/newbot |
después contestamos a lo que nos va preguntando @BotFather, y le damos un nombre a nuestro bot
y seguimos otorgándole un nombre de usuario (username):
Así que ya tenemos nuestro bot creado. Lo más importante después de crear el bot y darle nombre, es conseguir el TOKEN de Telegram API para este bot. @BotFather nos lo proporciona después de darle nombre y username a nuestro bot:
3.2 TOKEN de Telegram para nuestro bot
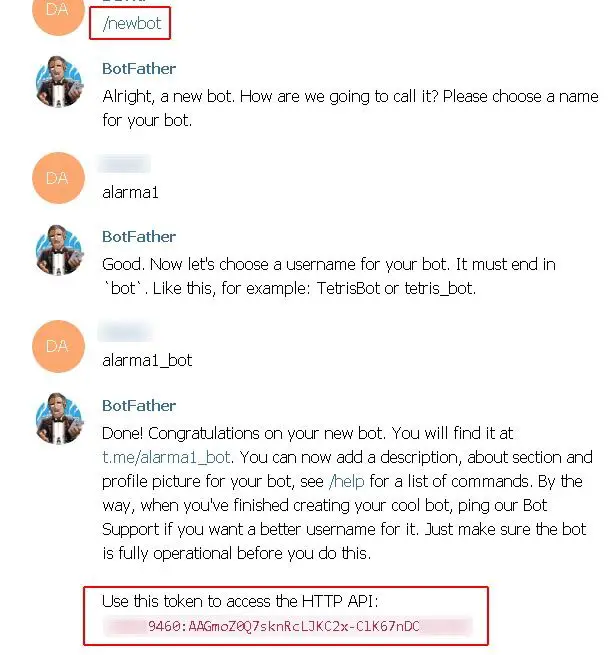
Use this token to access de HTTP API:
xxxxxx9460:AAGmoxxxxxxxxxxxxxxxxxxxxxx
Este TOKEN es lo más importante, ya que nos permitirá autenticarnos con la API de Telegram e interactuar con nuestro bot y hacer que comience a funcionar.
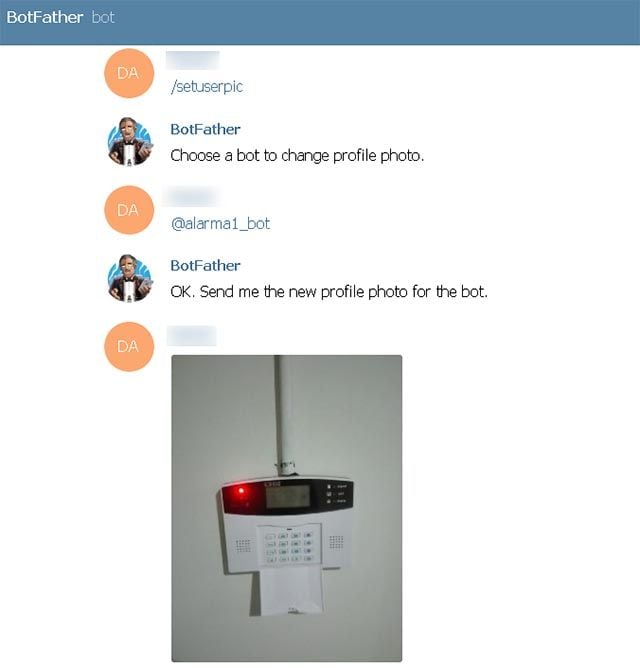
3.3 Foto para nuestro bot
Si queremos poner una foto a nuestro bot, utilizamos el comando
/setuserpic |
Si necesitamos más ayuda, utilizamos el comando
/help |
Que nos mostrará los comandos disponibles para utilizar con GodFather y configurar nuestro bot.
3.4 Comandos disponibles con @GodFather
I can help you create and manage Telegram bots. If you’re new to the Bot API, please see the manual.
You can control me by sending these commands:
/newbot – create a new bot
/mybots – edit your bots [beta]
Edit Bots
/setname – change a bot’s name
/setdescription – change bot description
/setabouttext – change bot about info
/setuserpic – change bot profile photo
/setcommands – change the list of commands
/deletebot – delete a bot
Bot Settings
/token – generate authorization token
/revoke – revoke bot access token
/setinline – toggle inline mode
/setinlinegeo – toggle inline location requests
/setinlinefeedback – change inline feedback settings
/setjoingroups – can your bot be added to groups?
/setprivacy – toggle privacy mode in groups
Games
/mygames – edit your games [beta]
/newgame – create a new game
/listgames – get a list of your games
/editgame – edit a game
/deletegame – delete an existing game
4. Ahora vamos a integrar nuestro bot de Telegram con la API de Telegram en Raspberry Pi, y usarlo con Motion.
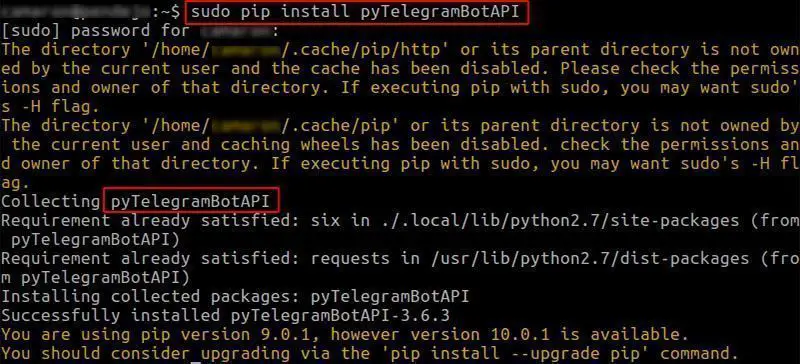
Vamos a instalar en nuestra Raspberry Pi la pyTelegramBotAPI de Eternnoir, que se trata de una implementación en Python de la API de Telegram Bot, y nos permitirá utilizar la API de Telegram en nuestra Raspberry Pi.
4.1 Instalar pyTelegramBotAPI
Lo instalamos simplemente con:
apt-get install pip pip install pyTelegramBotAPI |
Después veremos que para utilizar Motion con la API de Telegram existe otro paquete (Motion detection Telegram) que podemos instalar para que trabaje conjuntamente con pyTelegramBotAPI de Eternnoir . Lo vemos a continuación.
4.2 Instalar MOTION DETECTION TELEGRAM
Instalaremos Motion Detection Telegram con:
git clone https://github.com/ttan/motion-detection-telegram.git |
Y ya podemos comenzar a configurarlo. Los archivos importantes son
motion.py, que es el archivo donde introduciremos el TOKEN de nuestro bot de Telegram.
En mi caso lo modifiqué un poco para que solo enviara las imágenes usando el bot de Telegram, así:
import requests, glob, os
import sys
list_of_files = glob.glob('/etc/motion/cam1/*.jpg') # * means all if need specific format then *.csv
latest_file = max(list_of_files, key=os.path.getctime)
url = 'https://api.telegram.org/bot1234567890/' #REPLACE WITH BOT TOKEN, leaving 'bot' in the url
r1 = requests.post(url+'sendMessage', data={"chat_id": 00000000, "text": 'Motion detected'}) #REPLACE CHAT ID
fileName = latest_file
r3 = requests.post(url+'sendPhoto', files={'photo': open(fileName, 'rb')}, data={"chat_id": 00000000}) #REPLACE CHAT ID |
Tendremos que modificar el “Bot Token“, añadiendo el nuestro, y dejando la palabra “bot” delante como se puede ver.
También modificamos el “chat_id“, poniendo el nuestro.

y motion.conf, que es el archivo con el que configuraremos los parámetros de Motion y la cámara.
Para más info sobre Motion en Raspberry, puedes revisar todos los artículos al respecto AQUÍ.
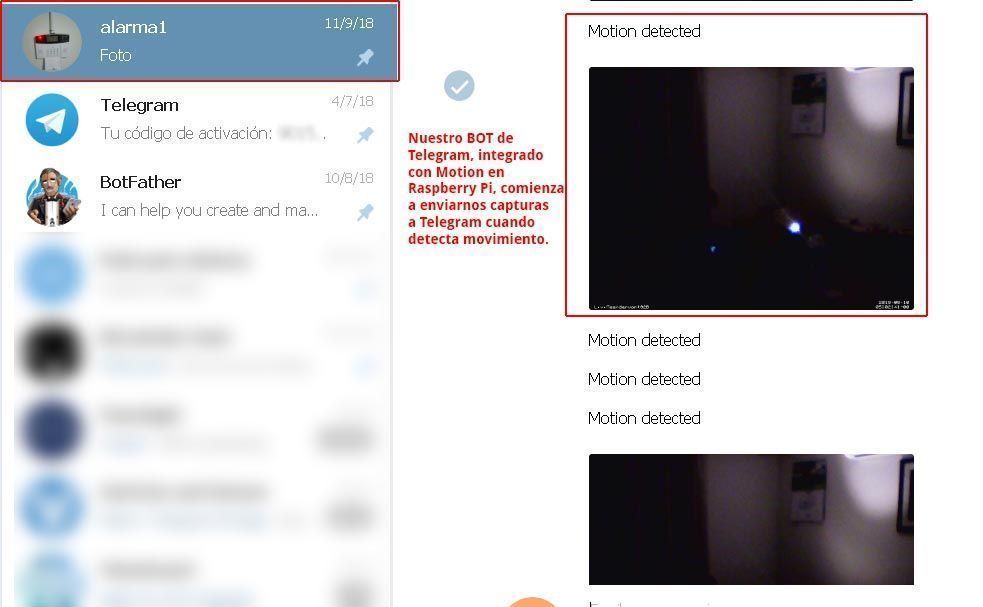
5. MOTION FUNCIONANDO EN Raspberry Pi y mandando fotos por Telegram
Ahora ya tenemos la API de Telegram instalada en la Raspberry Pi, e integrada con Motion Detection Telegram, que permite que Motion funcione con Telegram y nos envie las capturas/videos que vaya capturando:
Agradecimientos a Forajido6 🙂